- Published on
Multi-robot System for Collaborative Object Transport (MR.SCOT)
Project Info
Location: University of California, Riverside (UCR); Autonomous Robots and Control Systems (ARCS) Lab
Project Team: Gustavo J Correa, Vincent Tran, Kyle Semelka, Dr. Konstantinos Karydis (PI)
For our 2018-2019 Electrical Engineering Senior Design Project @ UC Riverside, we created MR.SCOT, a Multi-Robot System for Collaborative Object Transport. This project doubled as my University Honors Research Project. The aim of this project was to develop the prototype of a modular multi-robot system capable of transporting heavy, cumbersome, and weirdly shaped objects; a job difficult for traditional machinery and especially even more-so for a team of people.
We were inspired by many works developed in academia (i.e., UPenn-ModLab , MIT-Spheres, Stanford-MSL) and the aims set by the National Aeronautics and Space Administration (NASA). The design of our system was influenced by the requirements defined in the 2015 NASA Technology Roadmap which lists collaborative mobility algorithms and collaborative manipulation as focus areas needing an increase in technology readiness level (TRL) by 2035. Please see Section TA 4 of the technology roadmap for more information.
We successfully achieved a prototype of our system after 20 weeks of intensive research, development, and testing. To conquer the complexity of our project within the 20-week timeline, we organized ourselves and divided the tasks according to our strengths.
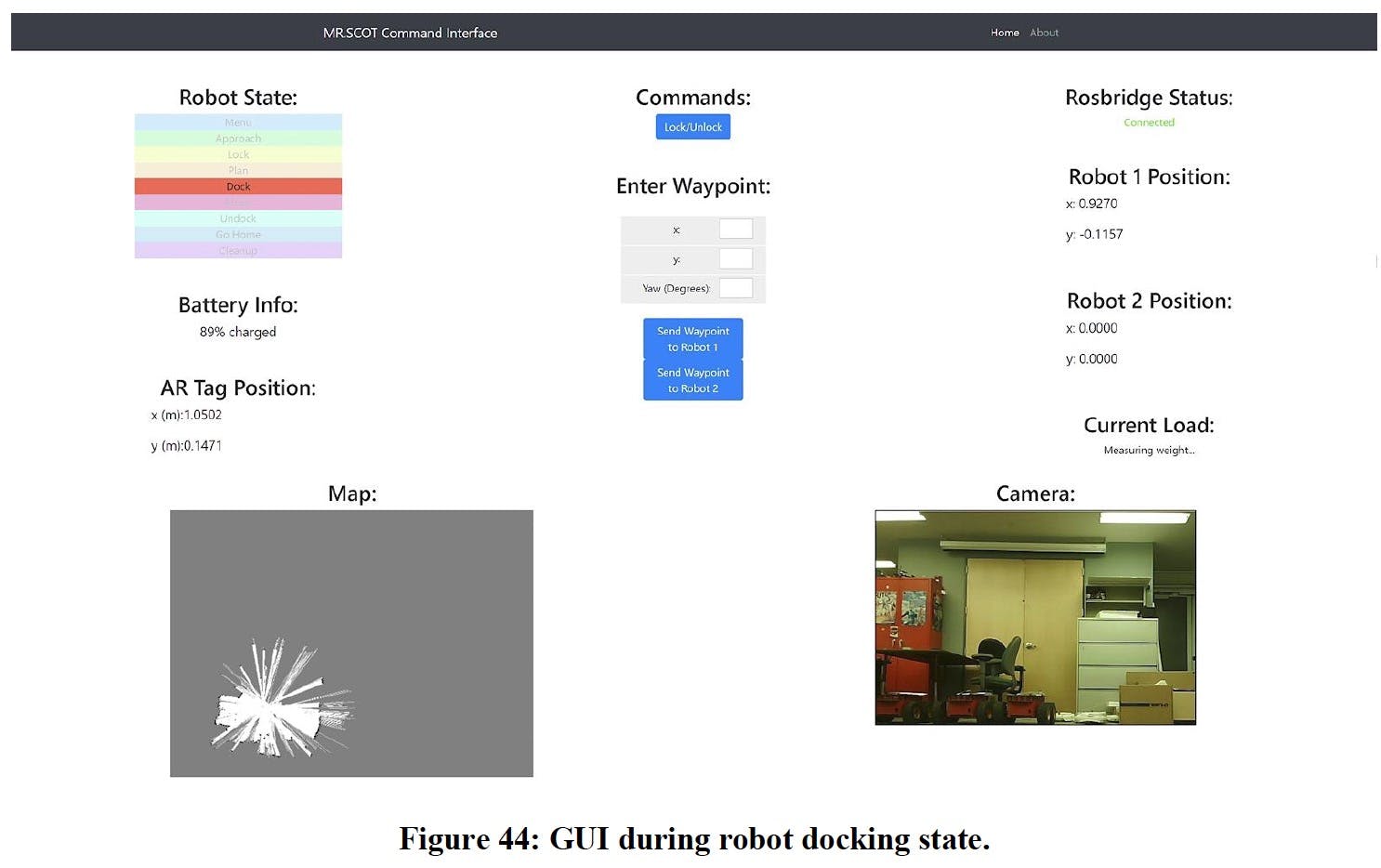
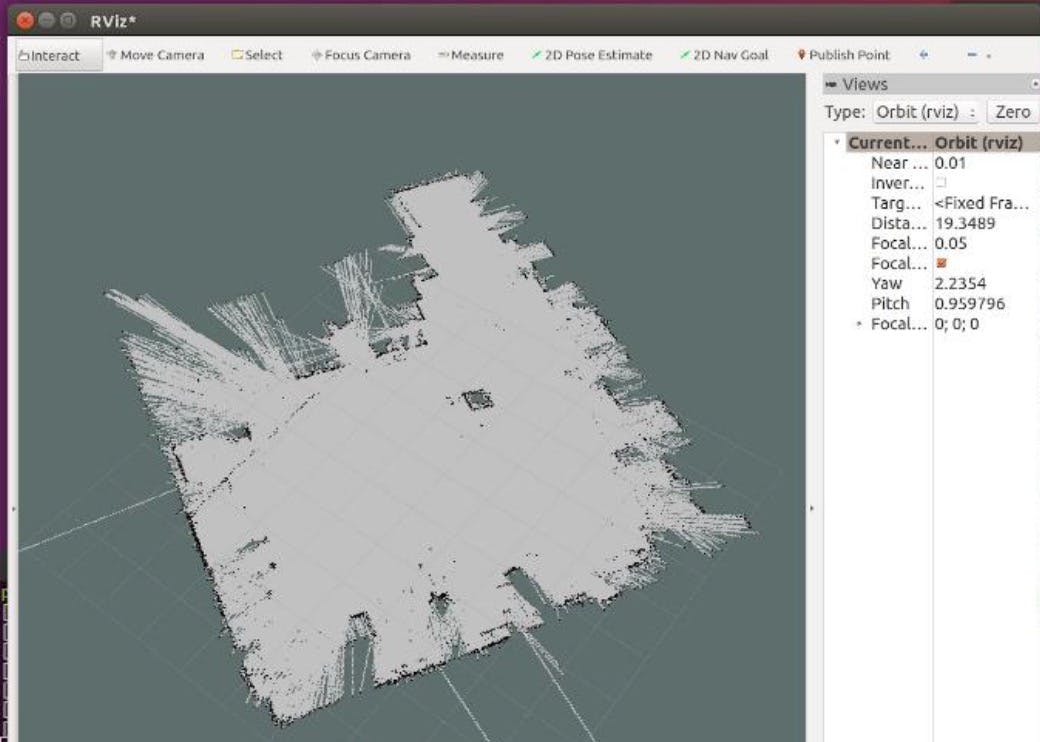
At the core of our project, we created a robot unit with 1) the hardware that enables it to physically (de)attach to other identical robot units and be able to continue driving together or separately, 2) the software that enables the robot to localize both itself and other robot units in the environment & be able to autonomusly move itself to dock to the other robot unit, and 3) the software graphical user interface to monitor the whole process. Ultimateley these capabilites fall under the research areas of simultaneous localization and mapping (SLAM), multi-robot docking, multi-robot coordination, and user-interface design.
Please see our senior design report for more information: here and here.





The Build Process

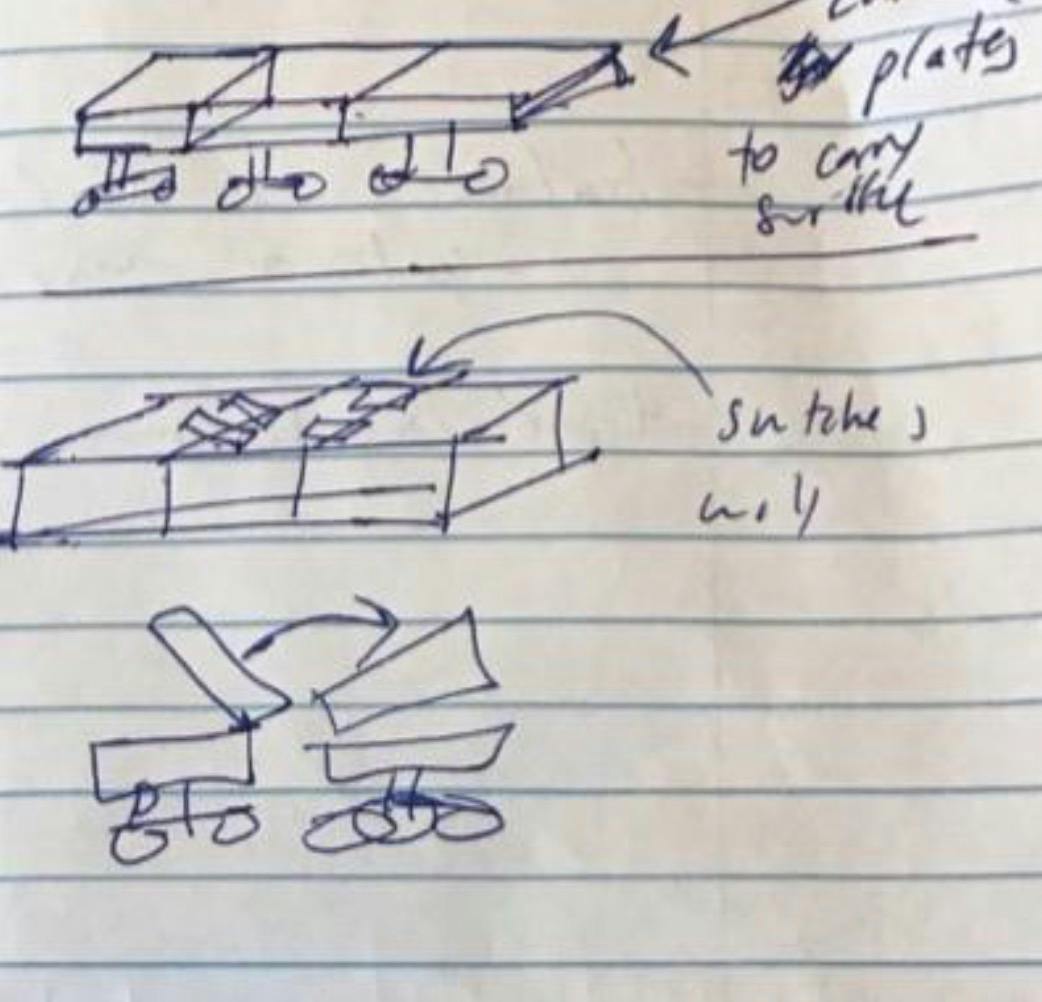
Idea Brainstorming

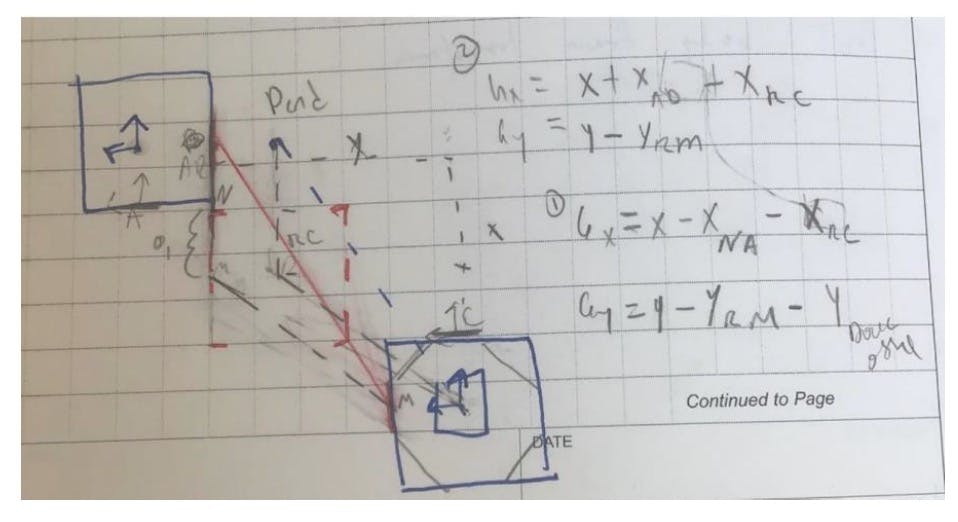
Algorithm Design

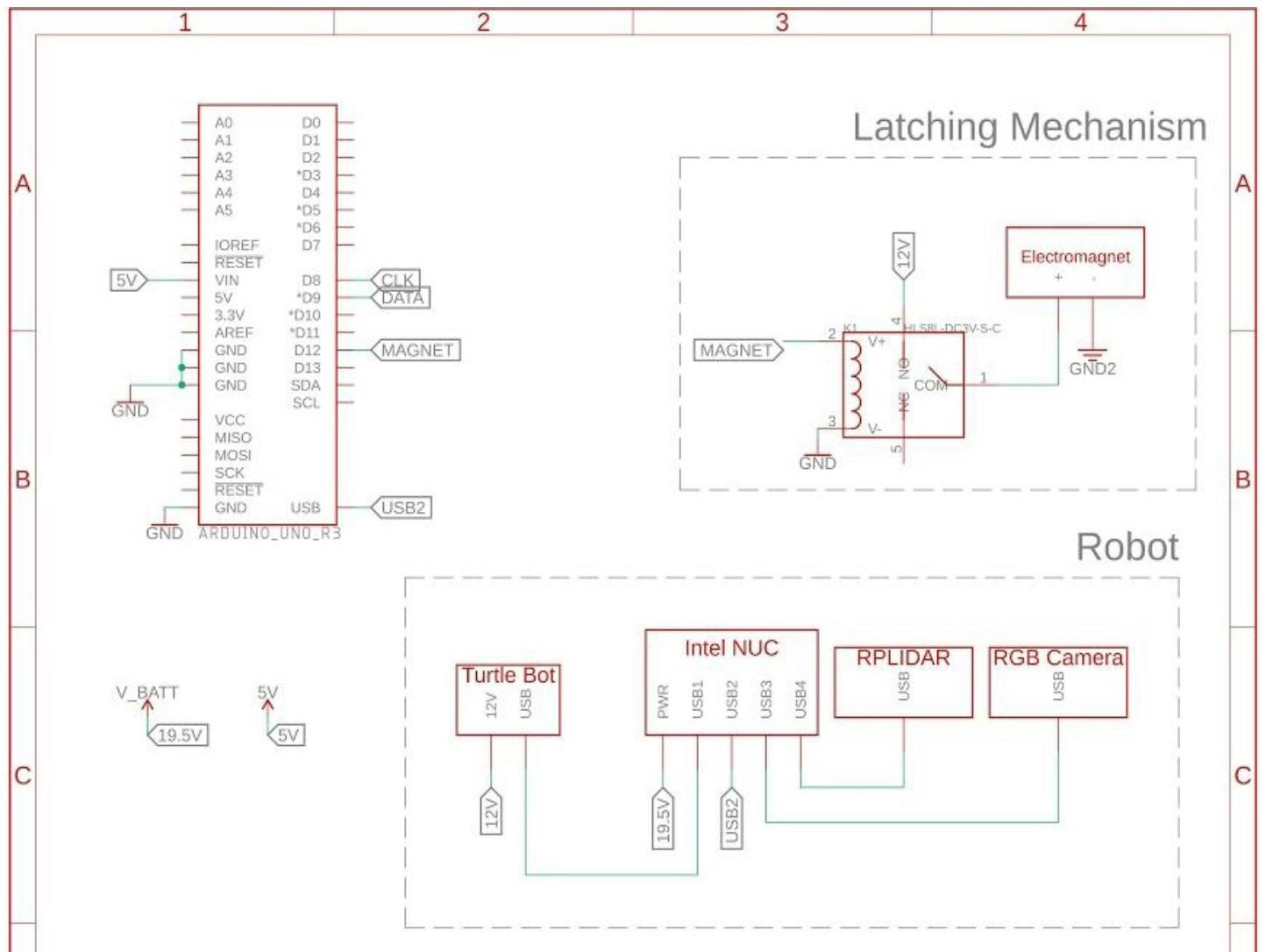
Electrical Design

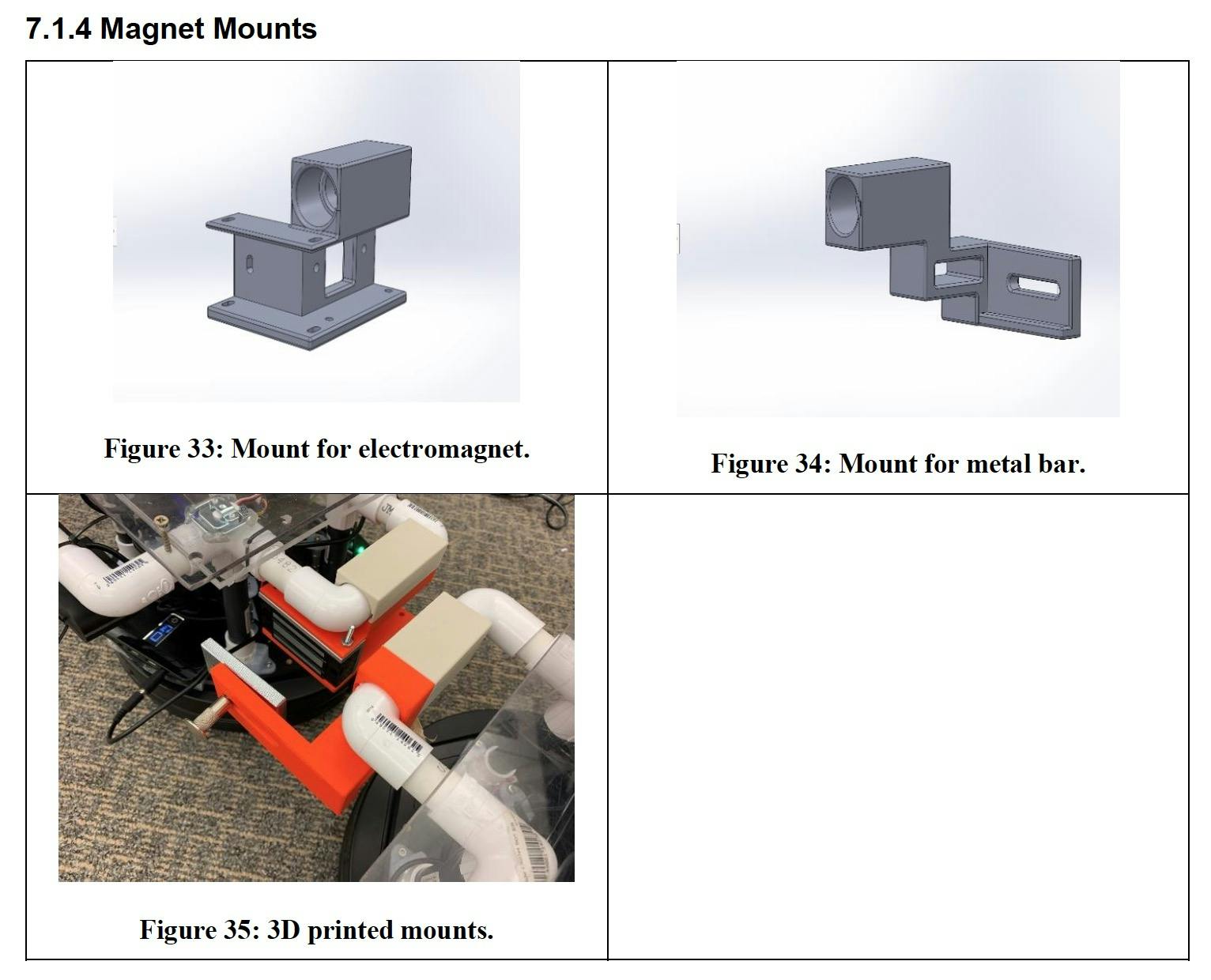
Mechanical Design

Autonomy
Graphical User Interface Design

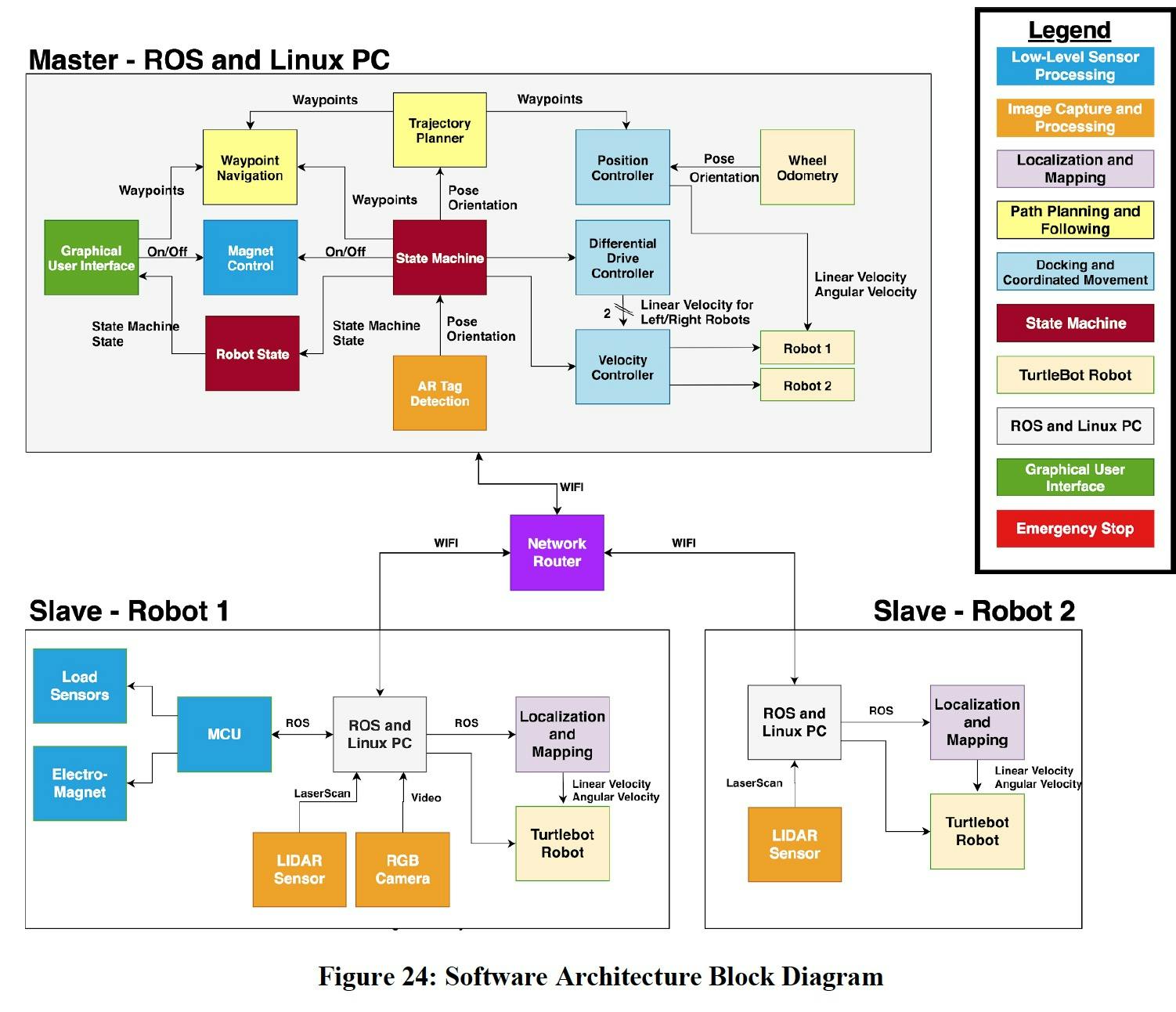
Software Architecture Design

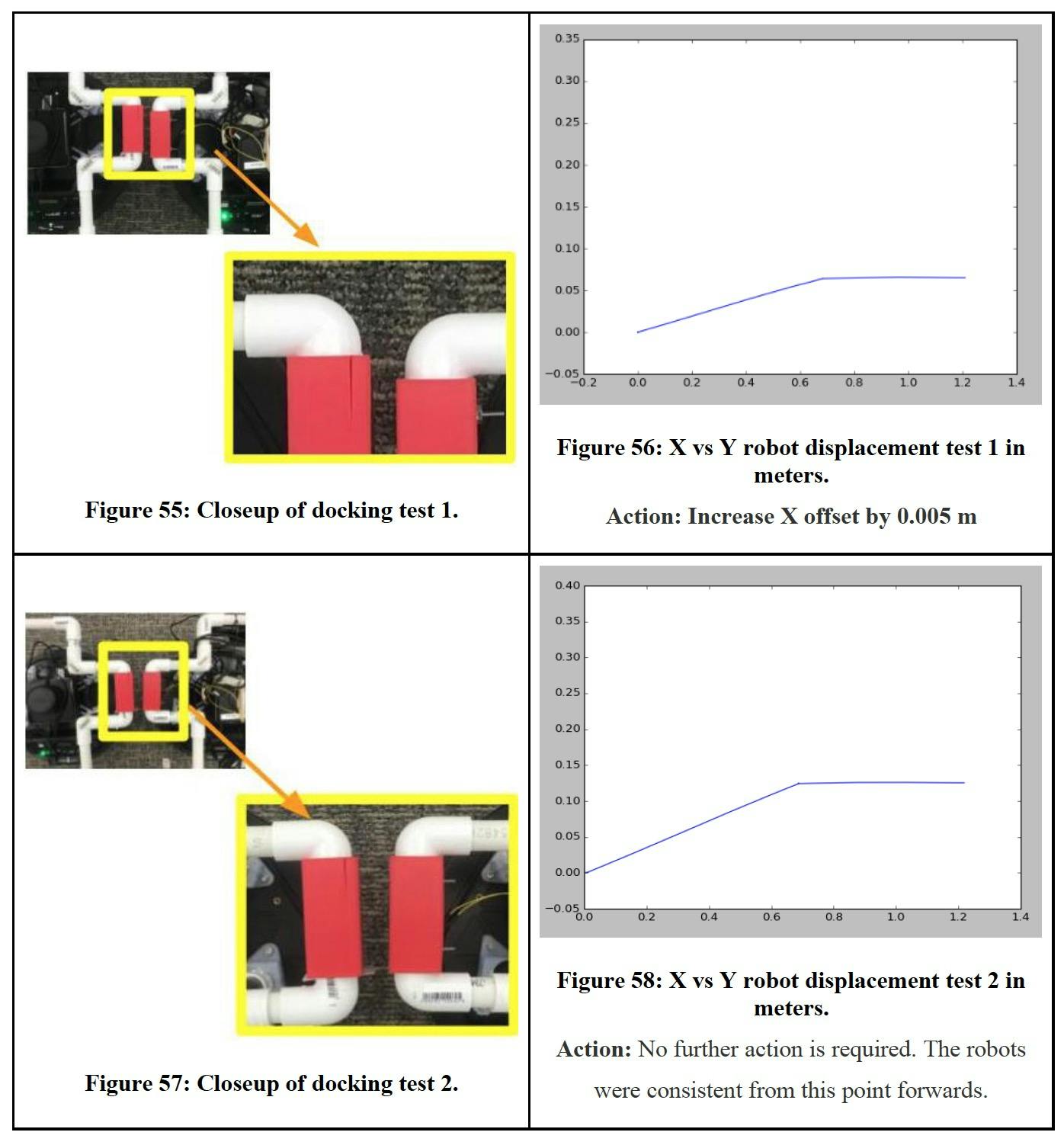
Testing and Parameter Tuning