- Published on
Compliant Legged Robot
Project Info
Location: University of California, Riverside (UCR); Autonomous Robots and Control Systems (ARCS) Lab
Project Members: Keran Ye, Gustavo J Correa, Dr. Konstantinos Karydis (PI)
As part of my Electrical Engineering M.S. program at UCR, I spent the first year working in the ARCS Lab directed by Dr. Konstantinos Karydis.
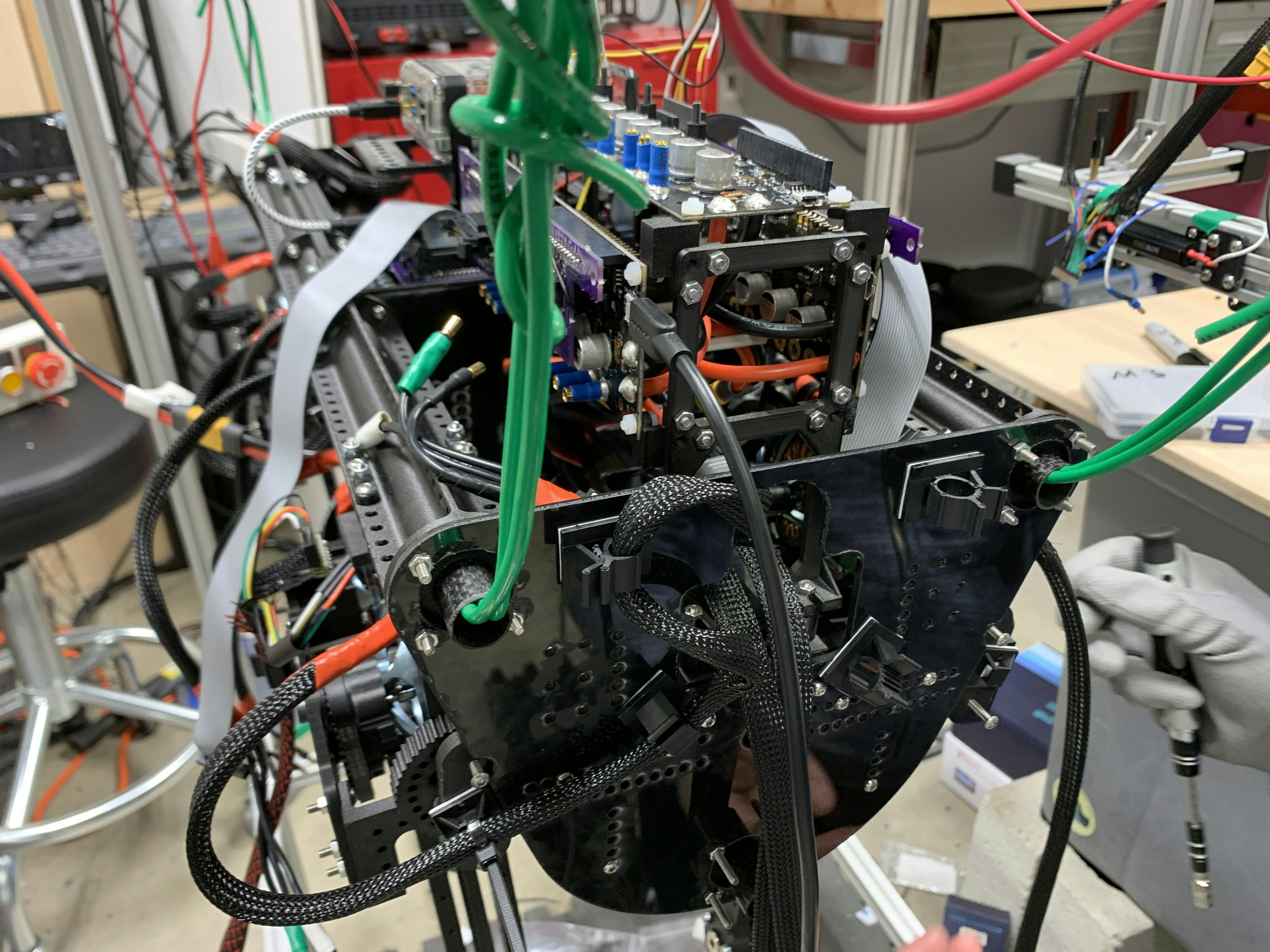
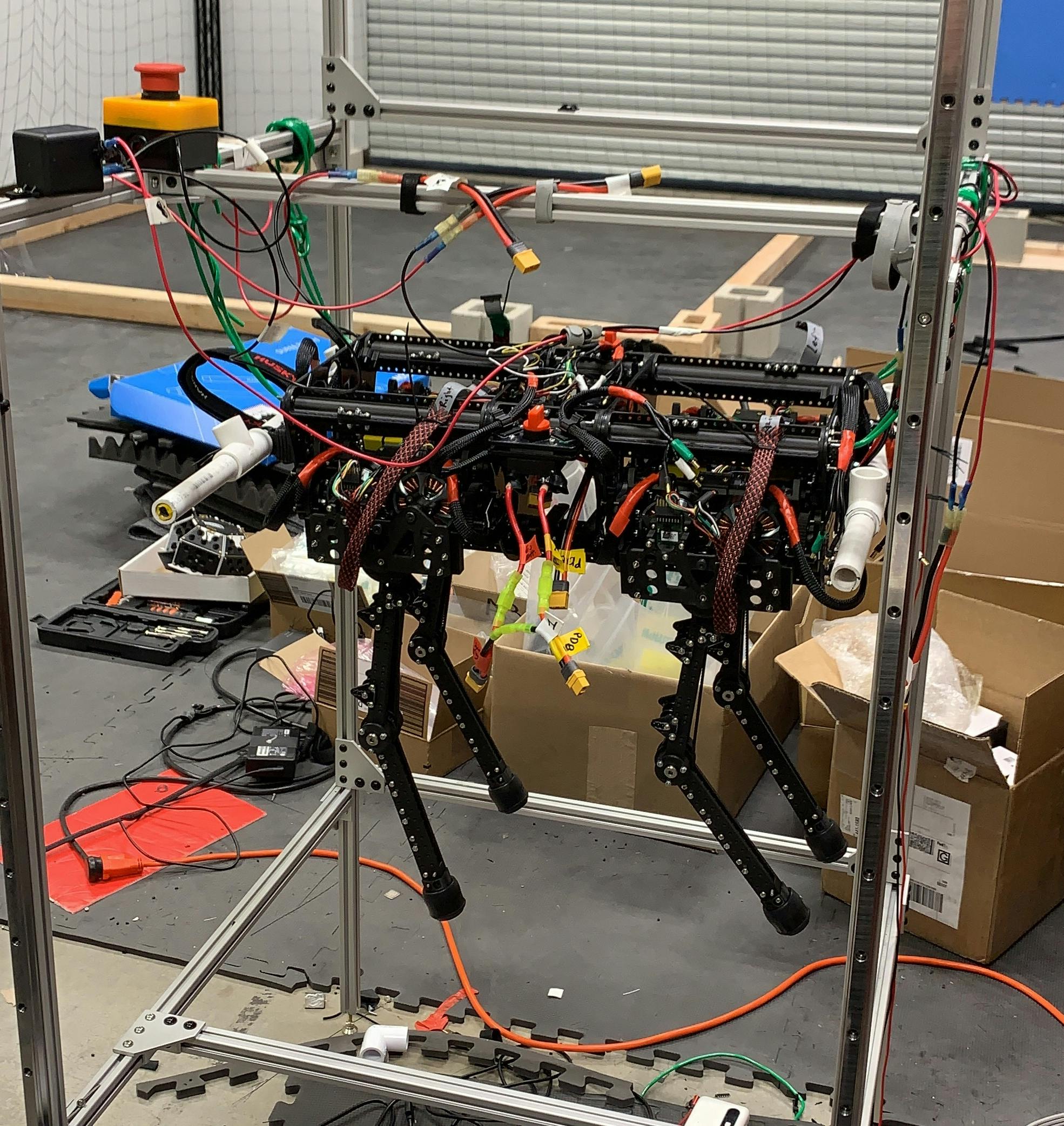
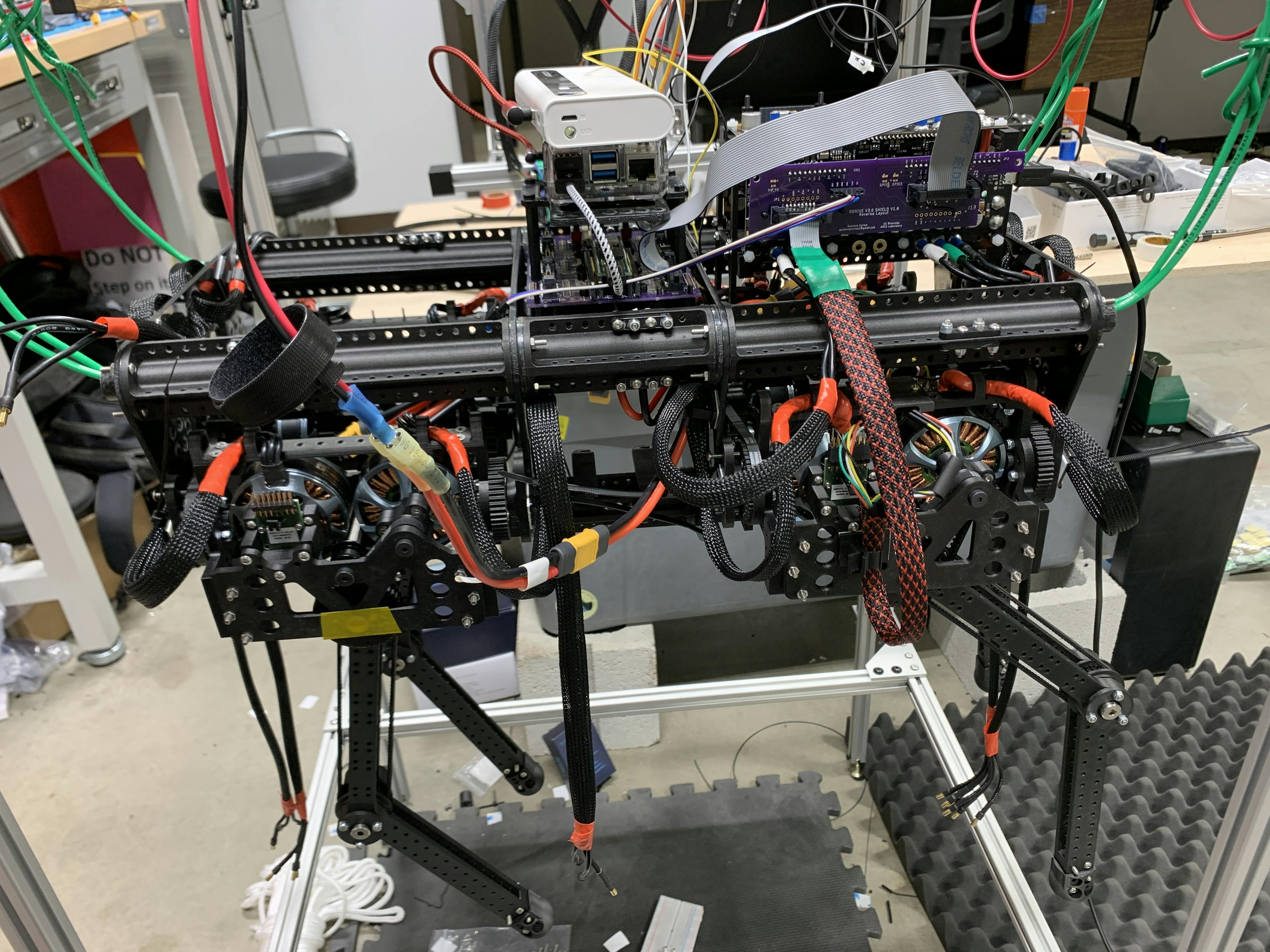
Together with Keran Ye, we built a legged robot from scratch to study the advantages of embedding compliance into the design of legged robots. See the image on the right.
Legged robots in academia & research tend to feature a more rigid morphology and commonly interpret body-environment interactions as a disturbance to their control framework. By embedding compliance into different parts of a legged robot (i.e., leg, actuator, hip, full-body), the goal here is to leverage the varying degrees of compliance to enable more robust and stable locomotion under pertubations with the environment. In this iteration of the robot's design, we embed compliance into the hip joints (also called the sprawling or Ab/Ad joints).
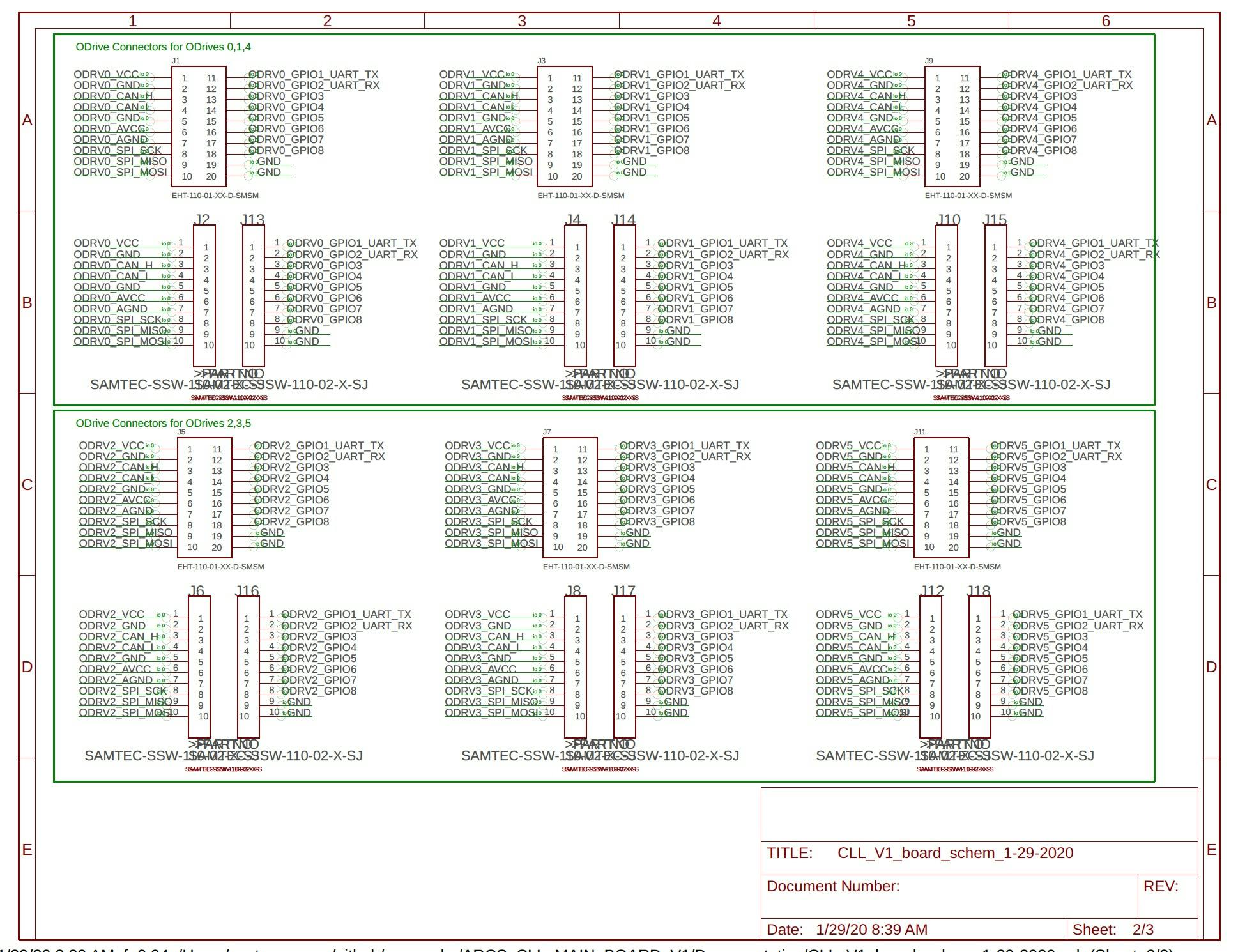
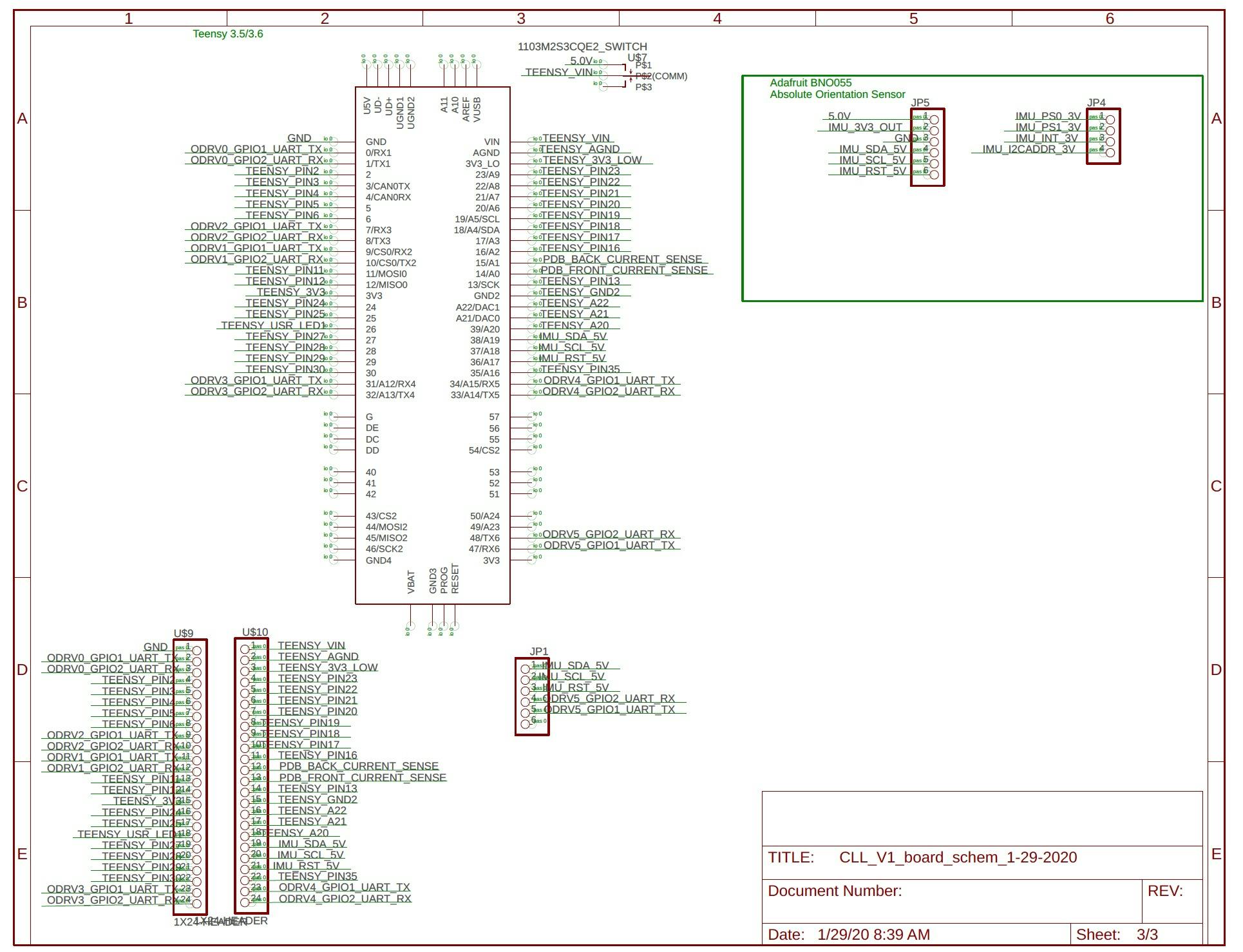
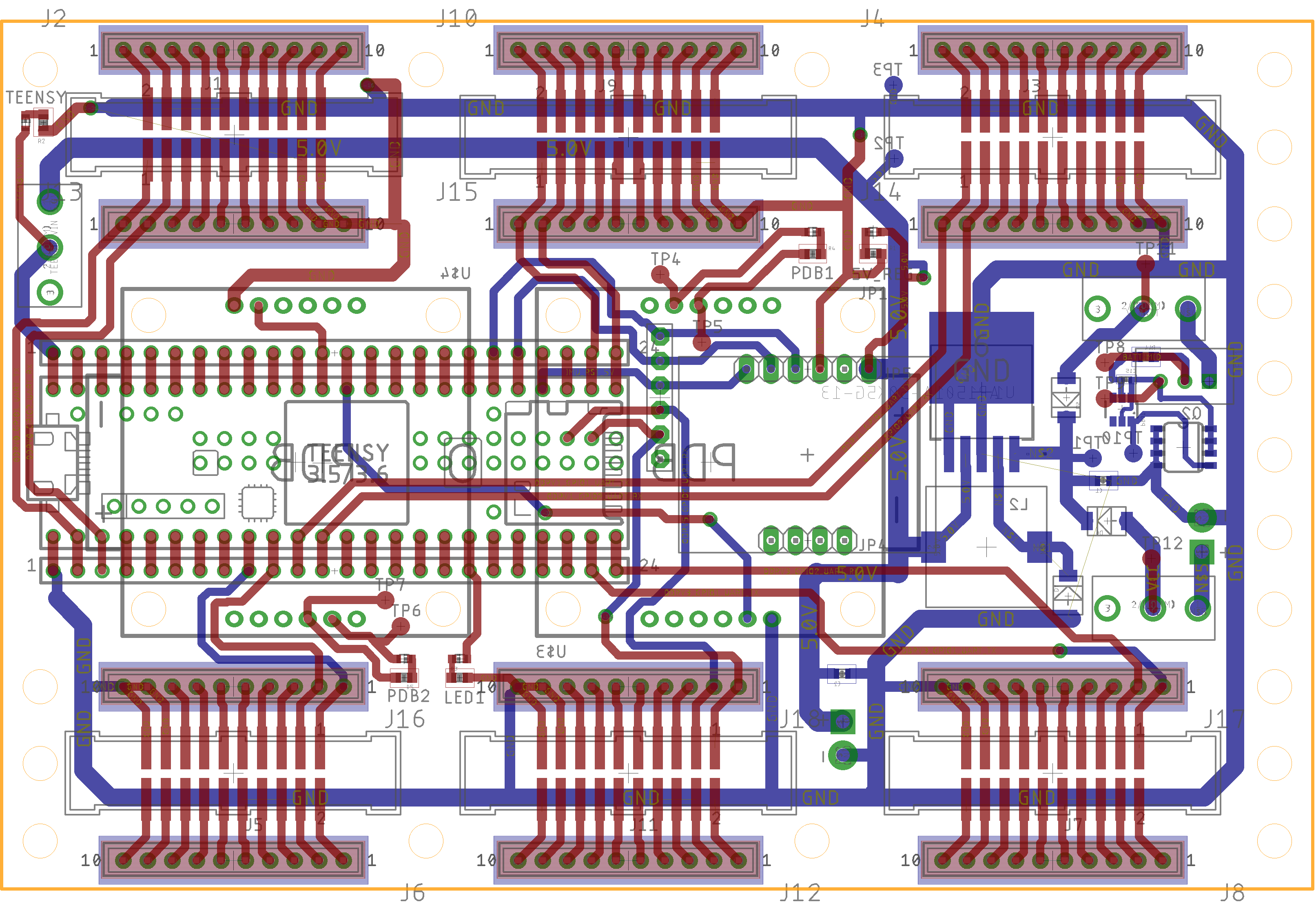
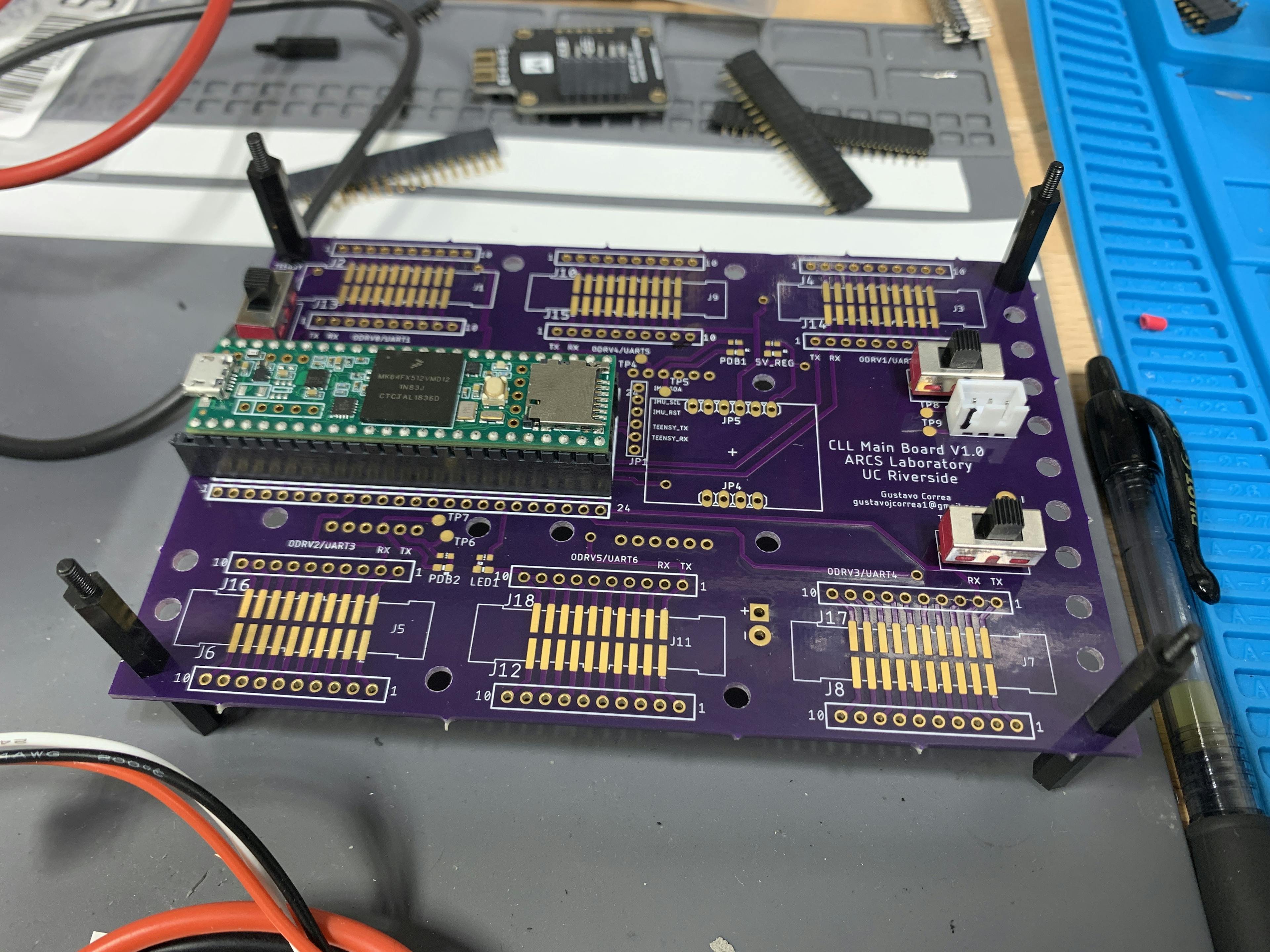
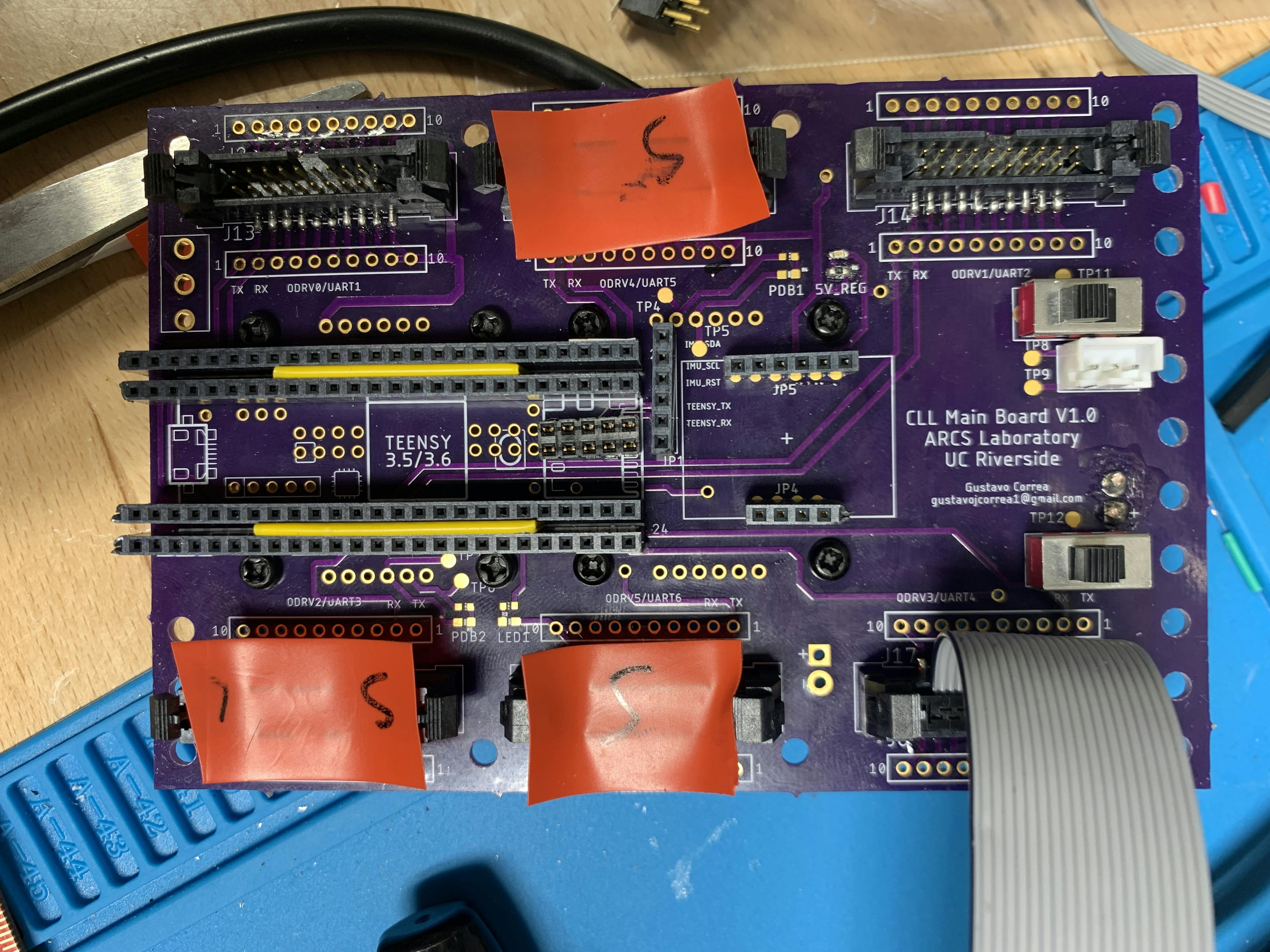
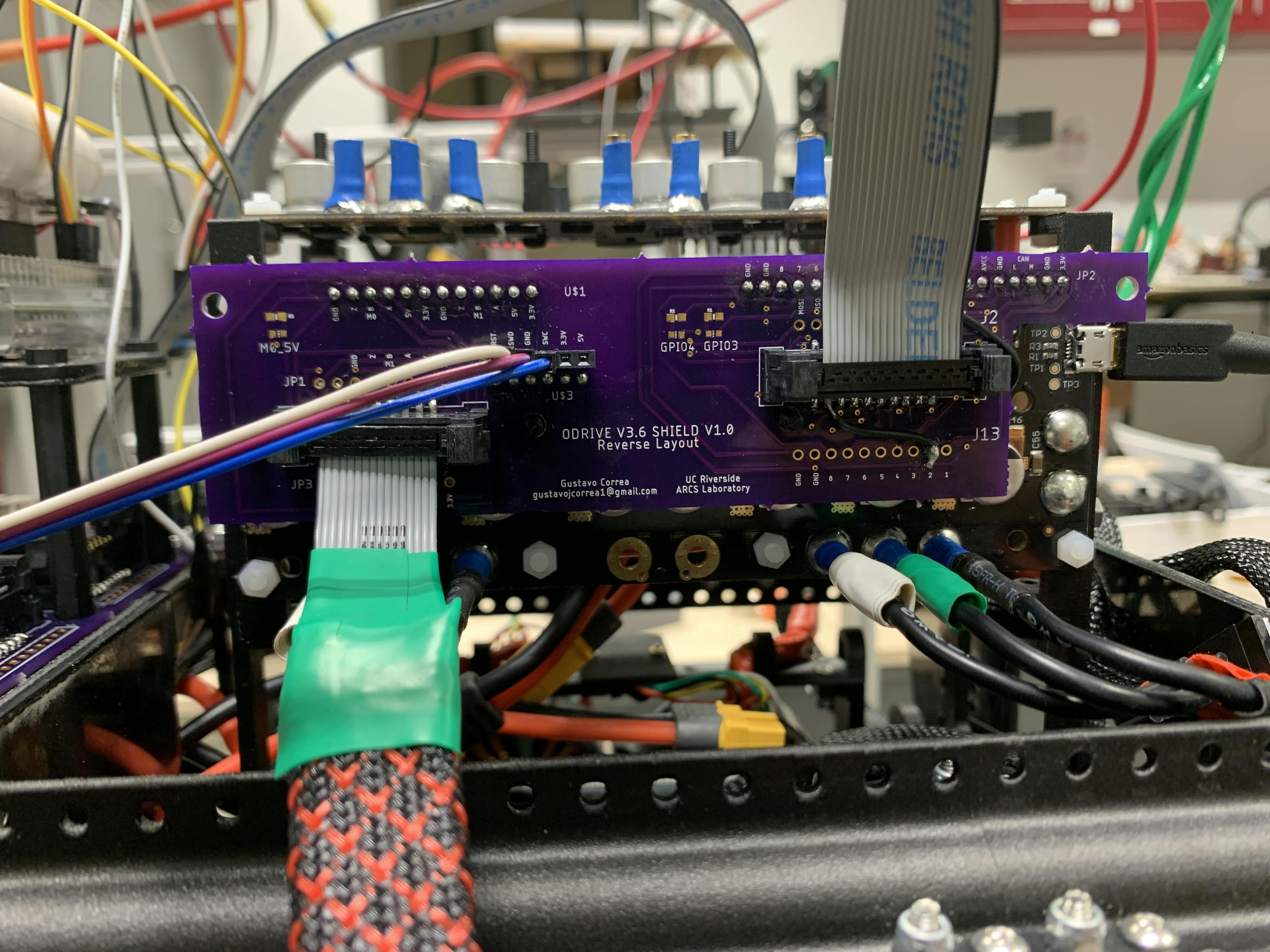
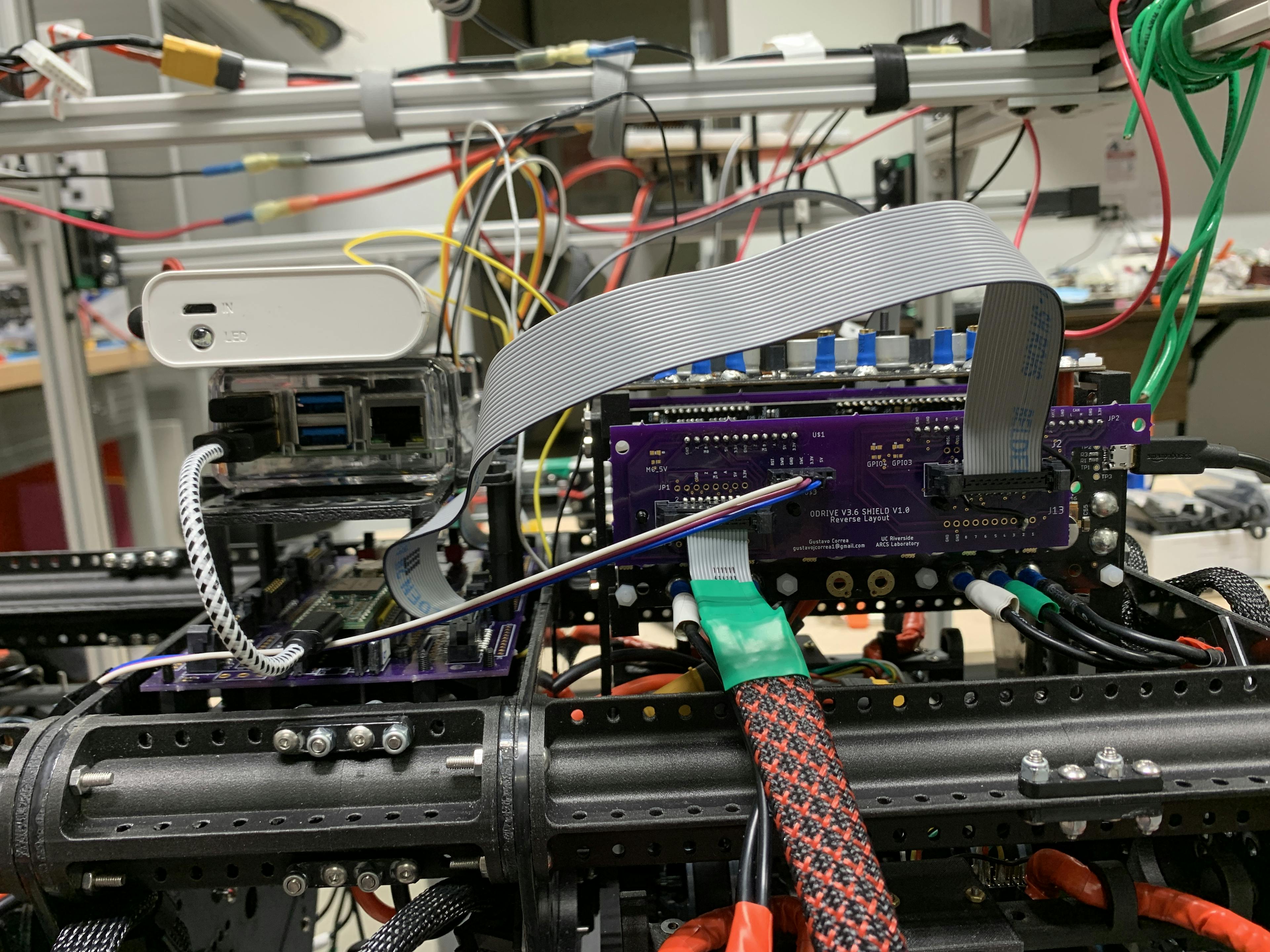
My contribution in this project was the design of all electronic hardware. I designed, prototyped and manufactured several printed circuit boards (PCB) to interface the central microcontroller unit (MCU) with the ODrive Motor Controller boards and other electronics.


The Build Process

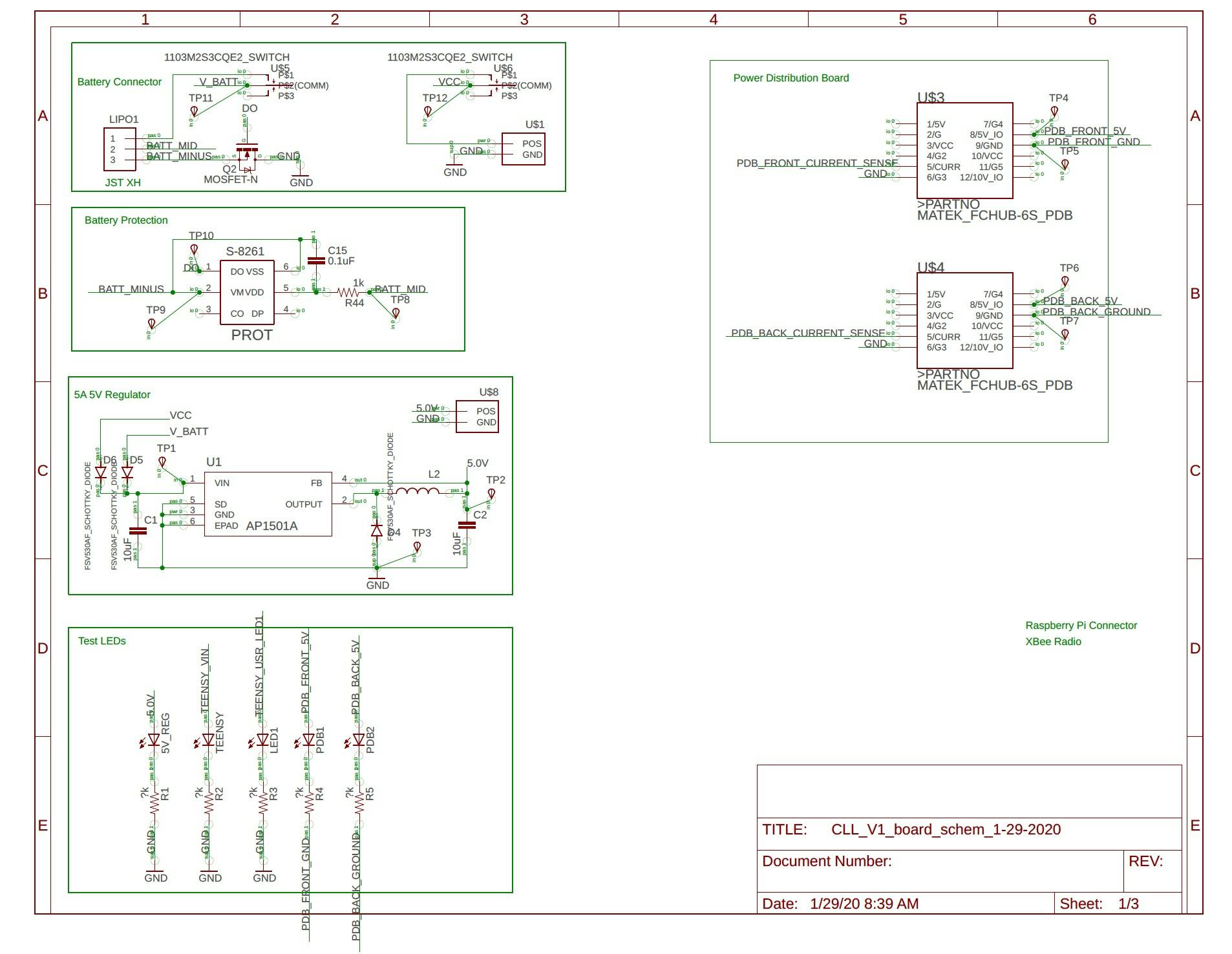
Schematic Design

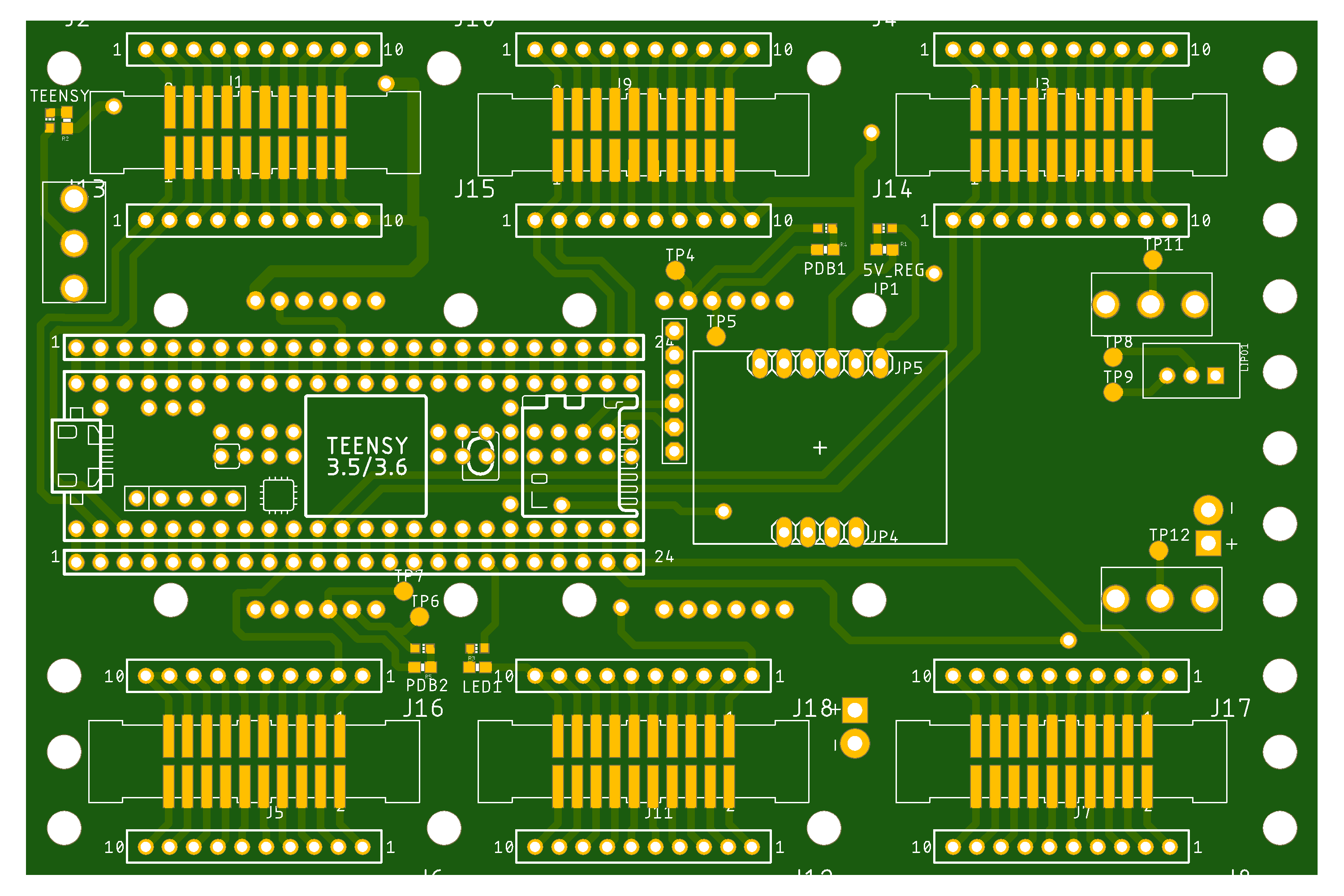
Board Layout

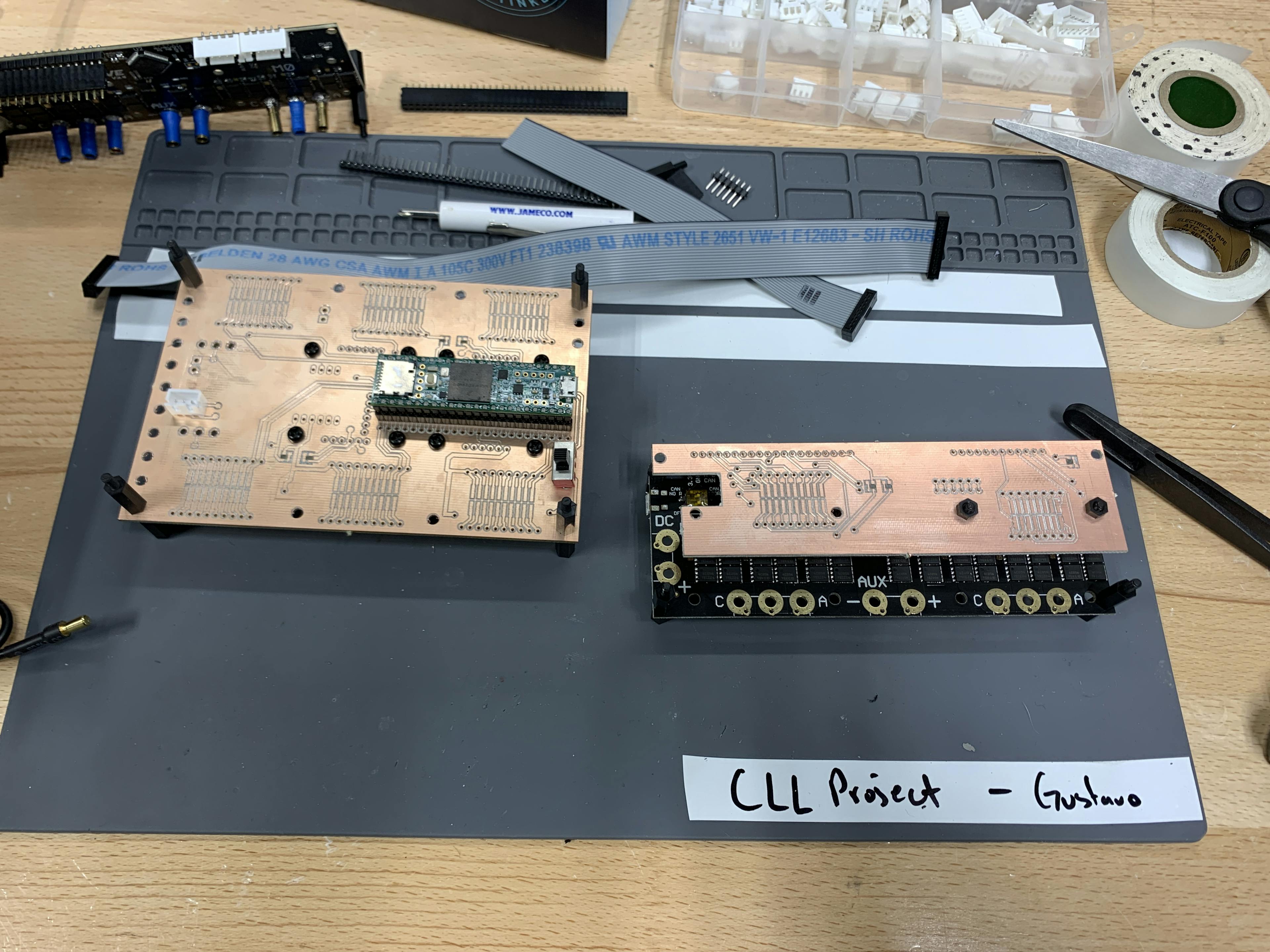
Prototyping, Verification and Testing
System Integration