- Published on
OpenRoACH, a durable open-source hexapedal platform with onboard robot operating system (ROS)
Project Info
Location: University of California, Berkeley; Biomimetic Millisystems Lab
Project Members: Liyu Wang, Yuxiang Yang, Gustavo Correa, Dr. Konstantinos Karydis, Dr. Ronald S Fearing (PI)
Citation: L. Wang, Y. Yang, G. Correa, K. Karydis, and R. Fearing. OpenRoACH: A Durable Open-Source Hexapedal Platform with Onboard Robot Operating System (ROS). IEEE Int. Conf. on Robotics and Automation (ICRA), Montreal, May 20-24, 2019. (https://arxiv.org/pdf/1903.00131.pdf)
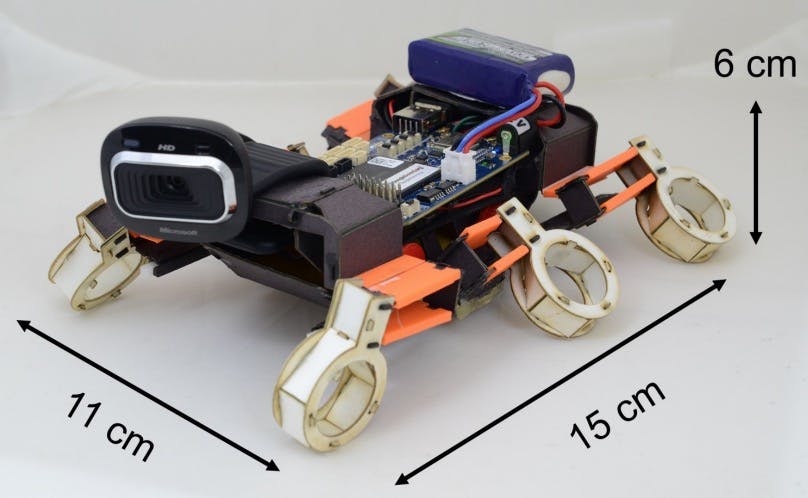
Abstract: — OpenRoACH is a 15-cm 200-gram self-contained hexapedal robot with an onboard single-board computer. To our knowledge, it is the smallest legged robot with the capability of running the Robot Operating System (ROS) onboard. The robot is fully open sourced, uses accessible materials and off-the-shelf electronic components, can be fabricated with benchtop fastprototyping machines such as a laser cutter and a 3D printer, and can be assembled by one person within two hours. Its sensory capacity has been tested with gyroscopes, accelerometers, Beacon sensors, color vision sensors, linescan sensors and cameras. It is low-cost within $150 including structure materials, motors, electronics, and a battery. The capabilities of OpenRoACH are demonstrated with multi-surface walking and running, 24-hour continuous walking burn-ins, carrying 200-gram dynamic payloads and 800-gram static payloads, and ROS control of steering based on camera feedback. Information and files related to mechanical design, fabrication, assembly, electronics, and control algorithms are all publicly available on https://wiki.eecs.berkeley.edu/biomimetics/Main/OpenRoACH.
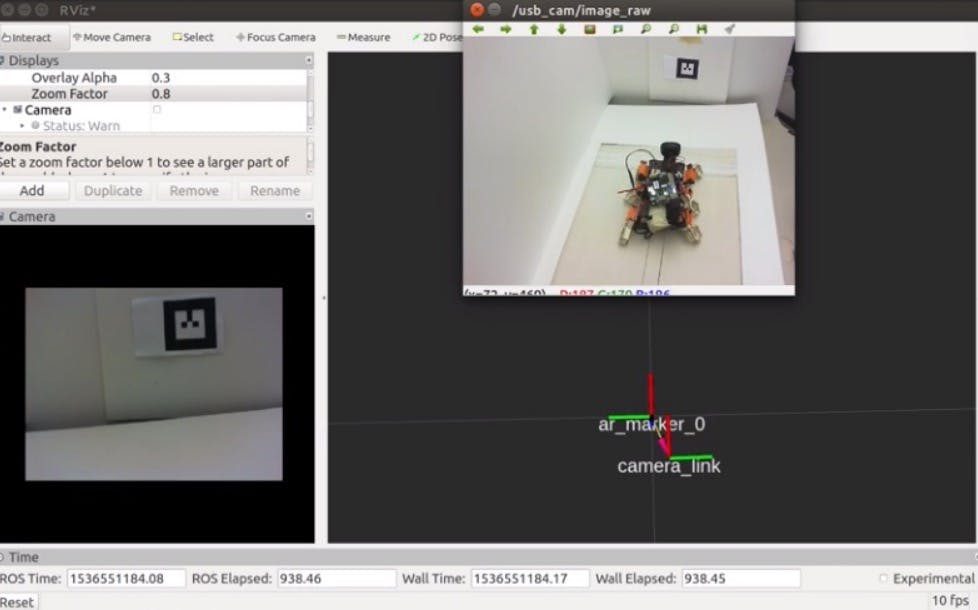
The image on the left is the OpenRoACH robot with a BeagleBone Blue linux-based computer running the Robot Operating System (ROS). The image on the right illustrates the robot's camera feedback of the April Tag being displayed on a PC with ROS RViz.
Images are from [@wang2019openroach].


Gallery


References
[wang2019openroach] L. Wang, Y. Yang, G. Correa, K. Karydis, and R. Fearing. OpenRoACH: A Durable Open-Source Hexapedal Platform with Onboard Robot Operating System (ROS). IEEE Int. Conf. on Robotics and Automation (ICRA), Montreal, May 20-24, 2019. (https://arxiv.org/pdf/1903.00131.pdf)