- Published on
Team CoSTAR, DARPA Subterranean Robotics Challenge
Introduction
From 2019 to 2021, I competed in the DARPA Subterranean Robotics Challenge as part of NASA Jet Propulsion Laboratory's, Team CoSTAR. The aim of this challenge was to develop technologies that enable the rapid mapping, navigation, and search of underground environments during time-sensitive disaster response scenarios. Team CoSTAR (Collaborative SubTerranean Autonomous Robots) demonstrated their technologies through a series of competitions, where they achieved 2nd and 1st place in the Tunnel (2019) and Urban Competitions (2020), respectively.
A publication summarizing the team's technology and findings can be found here: Link




Autonomy System
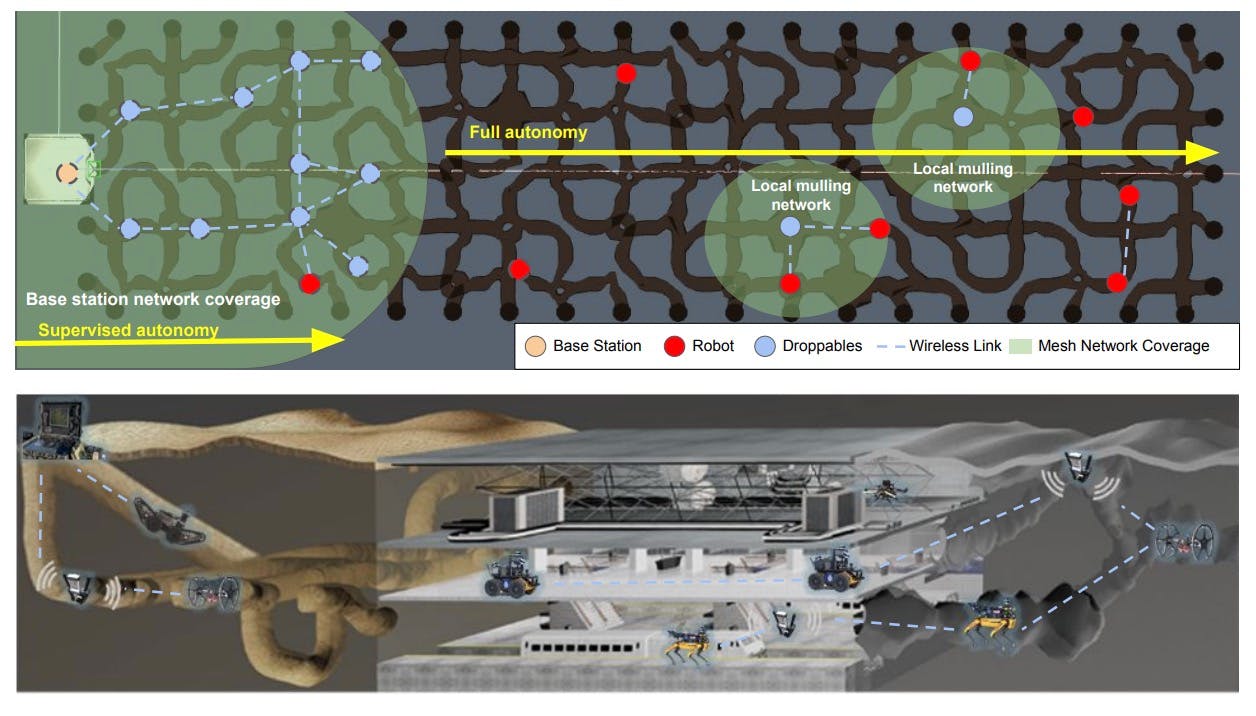
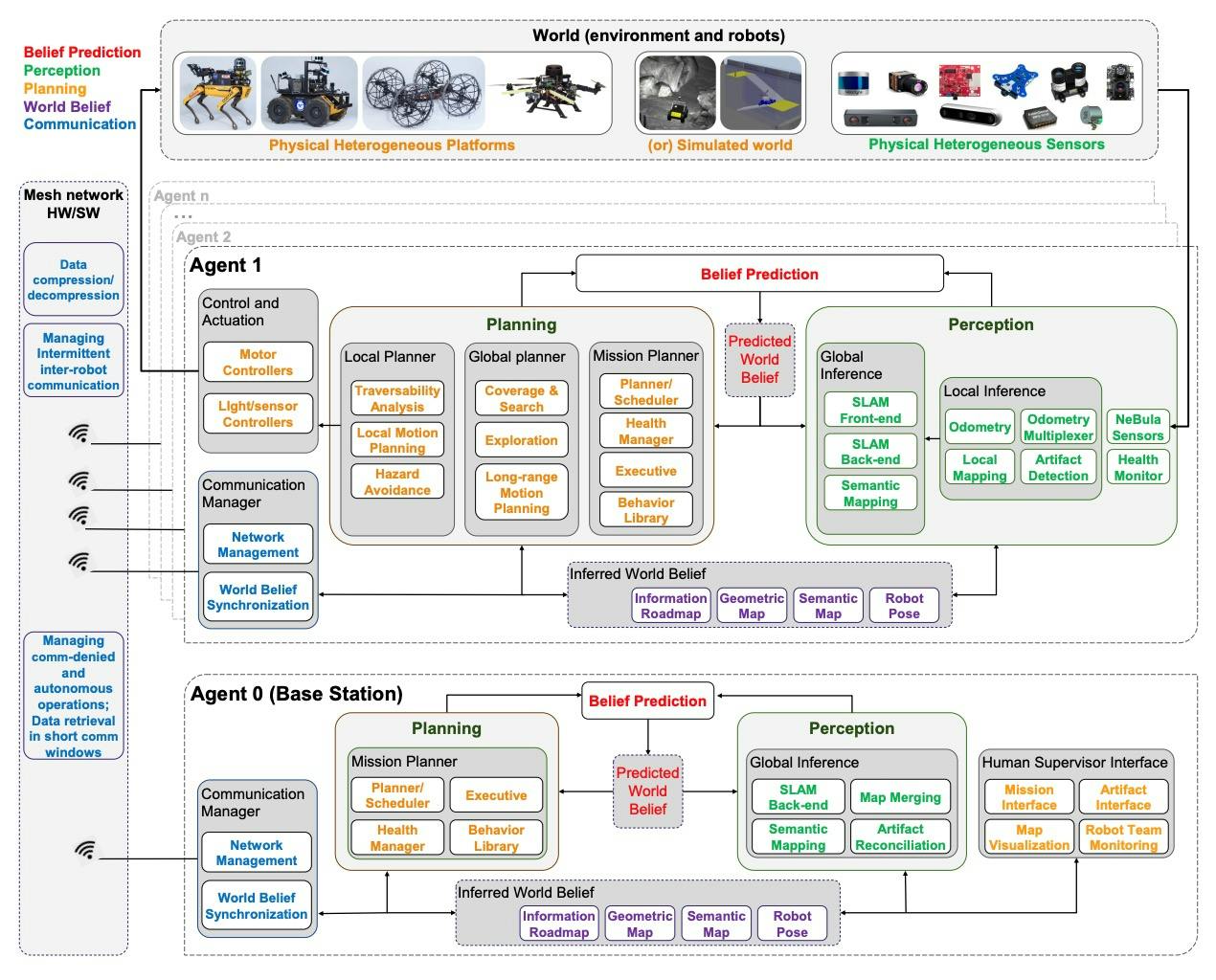
Extensive research and development was achieved in the areas of algorithms, hardware and software architecture to enable a team of robots with varying mobility (i.e., legged, wheeled and aerial) to autonomously explore difficult and unknown subterranean environments under several constraints (i.e., communication, energy, time). To navigate these constraints, Team CoSTAR developed NeBula, or Networked Belief-aware Perceptual Autonomy. The image on the left depicts the concept of operations (ConOps) Team CoSTAR developed to address the SubT challenge's aim of using robots to explore an unknown environment and identify & accurately localize as many artifacts (i.e., cell-phone, human survivor) as possible within the allocated time limit. The image on the right illustrates the autonomy solution's functional block diagram. Images are from [@agha2021nebula].


Technical Contribution
I worked with the Mission Planning & Autonomy (MA) and Multi-robot Communication (Comms) teams, lead by Dr. Tiago Vaquero and Dr. Jeffrey Edlund, respectively.
Designing autonomous systems such as the complex multi-robot systems developed for the SubT challenge benefit from having a modular software architecture and varying levels of abstraction. The Mission Planning & Autonomy layer is the highest-level layer in the autonomy system and is responsible for autonomously planning, reconfiguring and assigning tasks to the agents in the system. In the context of the SubT challenge, MA is crucial to achieve mission objectives especially when there is unreliable intermittent communication between robots and the single human supervisor. The MA team works together with the Comms team to build and maintain an inter-robot wireless mesh network, and modifies the network depending on the system's prioties at the time.
During my time in Team CoSTAR, I specifically contributed to the research, development and testing of technologies in the areas of human-computer interaction, human-robot interaction, multi-robot networking, and multi-robot simulation.

Multi-Robot GUI - A video game-inspired interface with an autonomous assistant. Tested with up to 11 robots. Image from [@kaufmann2022copiloting].
Paper Link and Blog Post

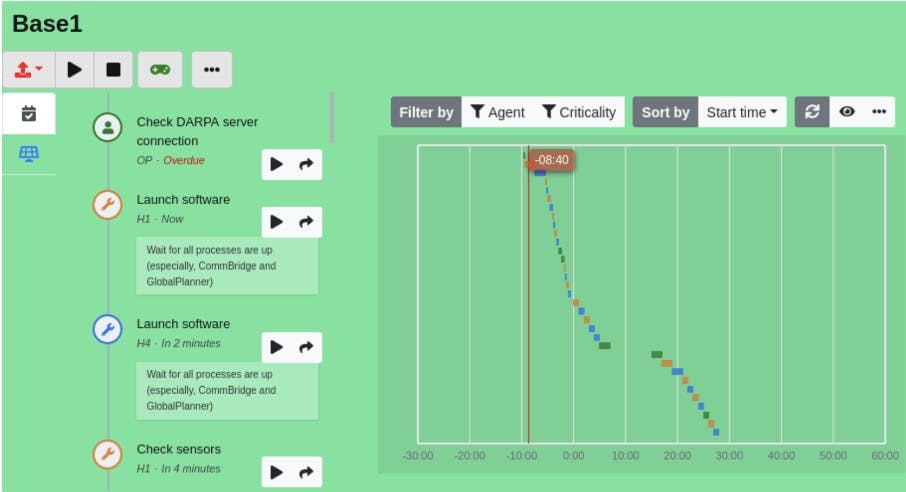
An Autonomous Assistant for Multi-Robot Operations - An autonomous assistant designed to support the single human supervisor during the setup and mission phases. Image from [@kaufmann2021copilot].
Paper Link and Blog Post


Communication-Aware Multi-Robot Coordination with Intermittent Connectivity - A multi-layer networking solution for autonomous & collaborative high bandwidth operations with radio droppables. Image from [@saboia2022achord].
Paper Link and Blog Post
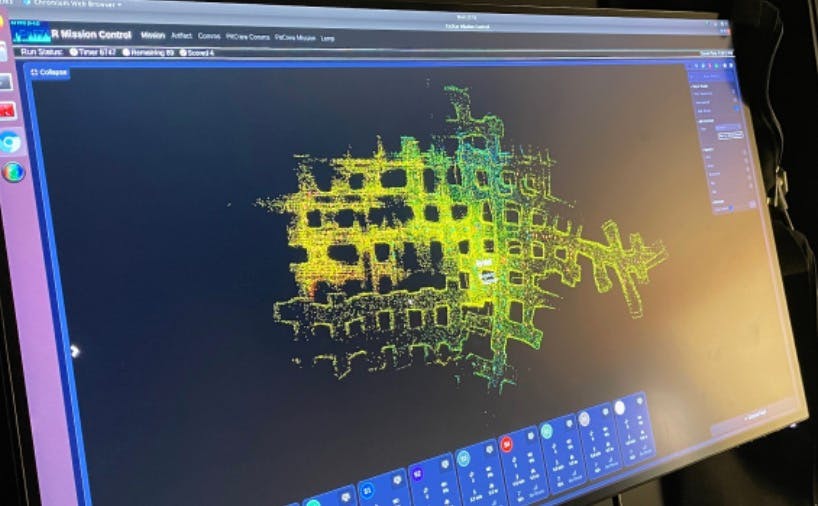
Real-world Field Testing
Extensive testing was conducted at various subterranean environments that emulate similar conditions present in cave, urban, and tunnel-like environments.




Project Team
This project would not have been made possible without the amazing leadership of Team CoSTAR and all the engineers, scientists, artists and business leaders that have contributed to advancing the state-of-the-art in robotics.
Ali Agha, Kyohei Otsu, Benjamin Morrell, David D Fan, Rohan Thakker, Angel Santamaria-Navarro, Sung-Kyun Kim, Amanda Bouman, Xianmei Lei, Jeffrey Edlund, Muhammad Fadhil Ginting, Kamak Ebadi, Matthew Anderson, Torkom Pailevanian, Edward Terry, Michael Wolf, Andrea Tagliabue, Tiago Stegun Vaquero, Matteo Palieri, Scott Tepsuporn, Yun Chang, Arash Kalantari, Fernando Chavez, Brett Lopez, Nobuhiro Funabiki, Gregory Miles, Thomas Touma, Alessandro Buscicchio, Jesus Tordesillas, Nikhilesh Alatur, Jeremy Nash, William Walsh, Sunggoo Jung, Hanseob Lee, Christoforos Kanellakis, John Mayo, Scott Harper, Marcel Kaufmann, Anushri Dixit, Gustavo J. Correa, Carlyn Lee, Jay Gao, Gene Merewether, Jairo Maldonado-Contreras, Gautam Salhotra, Maira Saboia Da Silva, Benjamin Ramtoula, Yuki Kubo, Seyed Fakoorian, Alexander Hatteland, Taeyeon Kim, Tara Bartlett, Alex Stephens, Leon Kim, Chuck Bergh, Eric Heiden, Thomas Lew, Abhishek Cauligi, Tristan Heywood, Andrew Kramer, Henry A Leopold, Chris Choi, Shreyansh Daftry, Olivier Toupet, Inhwan Wee, Abhishek Thakur, Micah Feras, Giovanni Beltrame, George Nikolakopoulos, David Shim, Luca Carlone, Joel Burdick
Gallery




Links
References:
[@agha2021nebula] A. Agha-mohammadi, et. al. NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge. Field Robotics Special Issue in Advancements and lessons learned during Phase I & II of the DARPA Subterranean Challenge, 2021.(https://arxiv.org/abs/2103.11470)
[@kaufmann2022copiloting] M. Kaufmann, R. Trybula, R. Stonebraker, M. Milano, G. J. Correa, T. S. Vaquero, K. Otsu, A. Agha-mohammadi, and G. Beltrame. Copiloting Autonomous Multi-Robot Missions: A Game-inspired Supervisory Control Interface. IEEE Robotics and Automation Letters (RA-L), 2022. Submitted for review. (https://arxiv.org/abs/2204.06647)
[@saboia2022achord] M. Saboia, L. Clark, V. Thangavelu, J. A. Edlund, K. Otsu, G. J. Correa, V. S. Varadharajan, ... and A. Agha-mohammadi. ACHORD: Communication-Aware Multi-Robot Coordination with Intermittent Connectivity." IEEE Robotics and Automation Letters (RA-L) and IEEE Int. Conf. on Intelligent Robots and Systems (IROS), 2022. (https://arxiv.org/pdf/2206.02245)
[@kaufmann2021copilot] M. Kaufmann, T. S. Vaquero, G. J. Correa, K. Otsu, M. F. Ginting, G. Beltrame, and A. Agha-mohammadi. Copilot MIKE: An Autonomous Assistant for Multi-Robot Operations in Cave Exploration. IEEE Aerospace Conference, 2021. (https://ieeexplore.ieee.org/abstract/document/9438530/)