- Published on
An Autonomous Assistant for Multi-Robot Operations in Cave Exploration
Project Info
Location: NASA Jet Propulsion Laboratory, Caltech; Pasadena, California
Project Members: Marcel Kaufmann, Tiago Stegun Vaquero, Gustavo J Correa, Kyohei Otsu, Muhammad F Ginting, Giovanni Beltrame, Ali-Akbar Agha-Mohammadi
Citation: M. Kaufmann, T. S. Vaquero, G. J. Correa, K. Otsu, M. F. Ginting, G. Beltrame, and A. Agha-mohammadi. Copilot MIKE: An Autonomous Assistant for Multi-Robot Operations in Cave Exploration. IEEE Aerospace Conference, 2021. (https://ieeexplore.ieee.org/abstract/document/9438530/)
Abstract: Operating a team of robots under time and risk constraints can be challenging for a human operator. Environmental conditions, extrinsic risks, and accessibility might restrict humans from directly partaking in exploration tasks altogether. Hence, robotic systems with autonomous exploration and disaster response capabilities have evolved over the past years and help keep human explorers and emergency response teams from harm. In this work, we introduce Copilot MIKE, an autonomous assistant for human-in-the-loop multi-robot operations. Copilot MIKE assists a single operator in monitoring robot teams, strategic planning, and communicating high level commands to the robots. During complex and potentially stressful exploration missions, Copilot MIKE helps to maintain a bearable workload and high situational awareness. In this work, we mainly focus on cave exploration tasks in the context of the DARPA Subterranean Challenge (SubT), but we designed a generic assistant that can be used in other domains, such as search and rescue, science, and (space) exploration missions as well. Experimental mission runs were conducted in preparation for the SubT cave challenge and Copilot MIKE has been tested in realistic cave exploration simulations. We show that Copilot MIKE has the potential to reduce workload, while our operators place trust in the system. They report that they focused on important parts of a mission, rather than planning, adopting and memorizing a complete mission strategy themselves.
Gallery
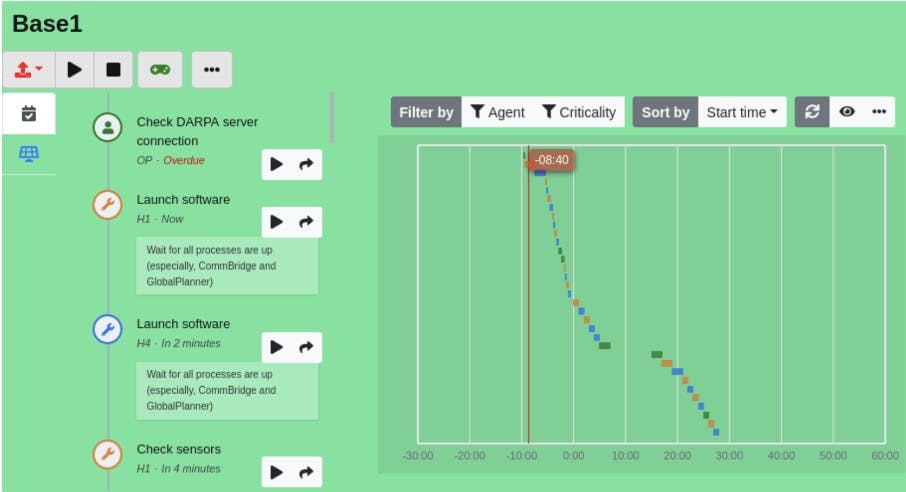
The image on the left illustrates the user interface component for Copilot MIKE. This component displays an interactive and chronological schedule of tasks being assigned to the operator by the system. The overall aim is to assist in reducing the operator's workload by keeping track of all important software and hardware tasks since the system can range in size from one to eleven robots. The image on the right illustrates a single operator operating the web-based user interface running on the base station that is connected to the multi-robot system.
Images are from [@kaufmann2021copilot].



References
[@kaufmann2021copilot] M. Kaufmann, T. S. Vaquero, G. J. Correa, K. Otsu, M. F. Ginting, G. Beltrame, and A. Agha-mohammadi. Copilot MIKE: An Autonomous Assistant for Multi-Robot Operations in Cave Exploration. IEEE Aerospace Conference, 2021. (https://ieeexplore.ieee.org/abstract/document/9438530/)