- Published on
Multi-robot Graphical User Interface
Project Info
Location: NASA Jet Propulsion Laboratory, Caltech; Pasadena, California
Project Members: Marcel Kaufmann, Robert Trybula, Ryan Stonebraker, Michael Milano, Gustavo J Correa, Tiago S Vaquero, Kyohei Otsu, Ali-akbar Agha-mohammadi, Giovanni Beltrame
Citation: M. Kaufmann, R. Trybula, R. Stonebraker, M. Milano, G. J. Correa, T. S. Vaquero, K. Otsu, A. Agha-mohammadi, and G. Beltrame. Copiloting Autonomous Multi-Robot Missions: A Game-inspired Supervisory Control Interface. IEEE Robotics and Automation Letters (RA-L), 2022. Submitted for review. (https://arxiv.org/abs/2204.06647)
Abstract: Real-world deployment of new technology and capabilities can be daunting. The recent DARPA Subterranean (SubT) Challenge, for instance, aimed at the advancement of robotic platforms and autonomy capabilities in three oneyear development pushes. While multi-agent systems are traditionally deployed in controlled and structured environments that allow for controlled testing (e.g., warehouses), the SubT challenge targeted various types of unknown underground environments that imposed the risk of robot loss in the case of failure. In this work, we introduce a video game-inspired interface, an autonomous mission assistant and test and deploy these using a heterogeneous multi-agent system in challenging environments. This work leads to improved human-supervisory control for a multi-agent system reducing overhead from application switching, task planning, execution, and verification while increasing available exploration time with this human autonomy teaming platform.
Gallery
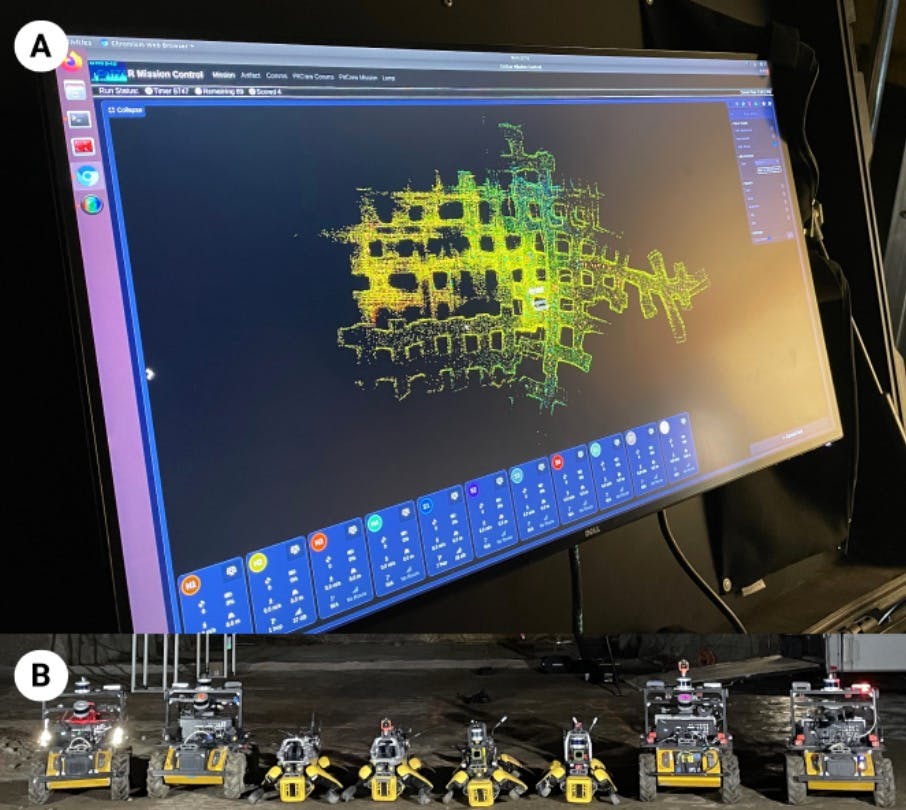
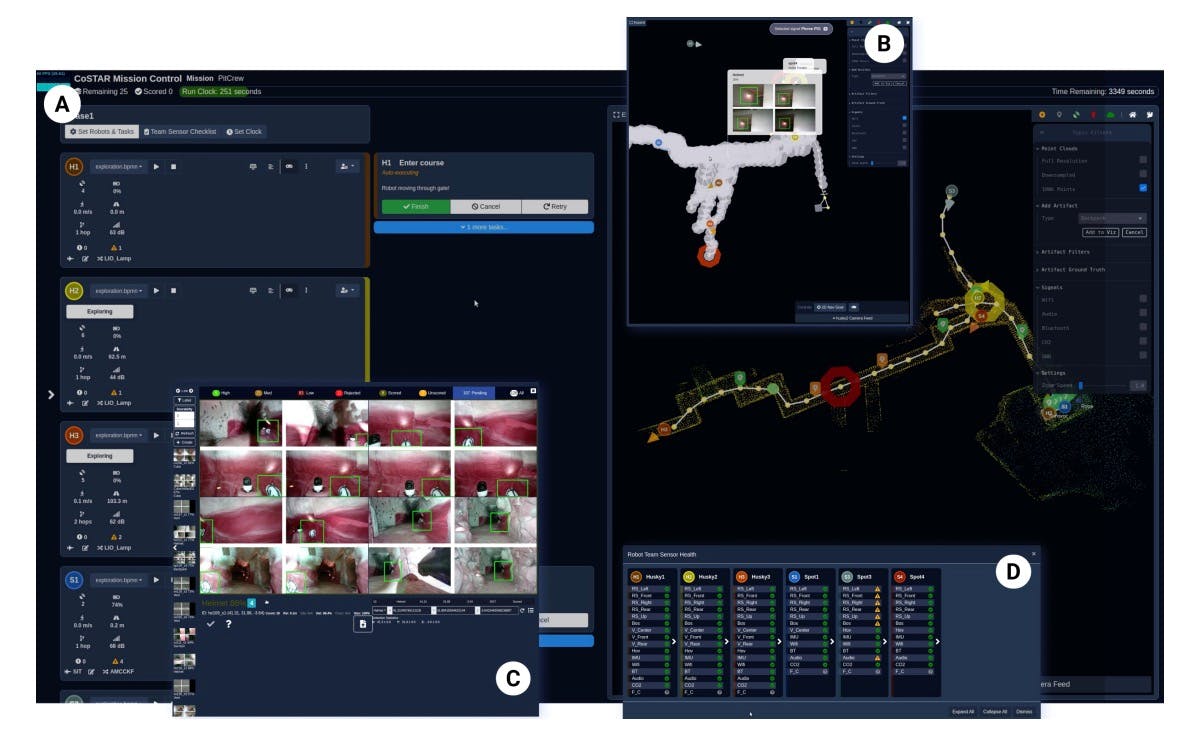
The image on the left illustrates the Mission Control user interface tested for deployment with 11 robots. A subset of robots are shown and consist of Boston Dynamic's Spot and Clearpath Husky robots. The image on the right illustrates an overview of the major UI components. Images are from [@kaufmann2022copiloting].


References
[@kaufmann2022copiloting] M. Kaufmann, R. Trybula, R. Stonebraker, M. Milano, G. J. Correa, T. S. Vaquero, K. Otsu, A. Agha-mohammadi, and G. Beltrame. Copiloting Autonomous Multi-Robot Missions: A Game-inspired Supervisory Control Interface. IEEE Robotics and Automation Letters (RA-L), 2022. Submitted for review. (https://arxiv.org/abs/2204.06647)